09/12/2017
La representación gráfica de la posición es fundamental en la física y otras disciplinas para comprender y analizar el movimiento de objetos o el estado de un sistema. Este artículo explorará en detalle los diferentes métodos para representar la posición, desde los sistemas de coordenadas más simples hasta los conceptos más complejos de la mecánica cuántica y la relatividad.
Posición en la Mecánica Clásica
En la mecánica clásica, la posición de una partícula se define mediante un vector de posición, generalmente denotado como r. Este vector se extiende desde el origen de un sistema de coordenadas hasta la ubicación de la partícula. En un espacio tridimensional, el vector de posición se puede expresar utilizando coordenadas cartesianas (x, y, z) o cualquier otro sistema de coordenadas adecuado.
Sistemas de Referencia
La elección del sistema de referencia es crucial para la determinación de la posición. Un sistema de referencia está definido por un origen y una base vectorial. Un cambio en el sistema de referencia, ya sea por traslación o rotación, modificará las coordenadas del vector de posición, aunque la posición física de la partícula permanece inalterada. La relación entre las coordenadas en dos sistemas de referencia paralelos, pero con distinto origen, está dada por: r = OO' + r', donde r es el vector de posición en el primer sistema, OO' es el vector que conecta los orígenes de ambos sistemas, y r' es el vector de posición en el segundo sistema. Las rotaciones del sistema de referencia implican transformaciones más complejas utilizando matrices de rotación.
Derivada Temporal del Vector de Posición
La derivada del vector de posición respecto al tiempo proporciona la velocidad de la partícula. En un sistema de referencia fijo, la velocidad se calcula simplemente derivando las componentes del vector de posición: v(t) = dr(t)/dt. Sin embargo, en sistemas de referencia en rotación, se deben considerar términos adicionales asociados a la rotación, dando lugar a la aparición de la velocidad angular (ω) en la ecuación de la velocidad.
| Sistema de Referencia | Ecuación de la Velocidad |
|---|---|
| Fijo | v(t) = dr(t)/dt |
| En rotación | v(t) = dr(t)/dt + ω × r |
En sistemas de referencia en rotación, las derivadas de los vectores unitarios también contribuyen a la velocidad, reflejando la geometría diferencial del espacio. Estos términos adicionales se describen mediante los símbolos de Christoffel (Γ), que caracterizan la conexión en el espacio curvo.
Posición en la Mecánica Relativista
En la relatividad especial, el espacio-tiempo de Minkowski permite definir un cuadrivector posición : X = (ct, x, y, z). La derivada de este cuadrivector respecto al tiempo propio da la cuadrivelocidad. La relatividad general complica la representación de la posición debido a la curvatura del espacio-tiempo. En este caso, no es posible describir la posición mediante un vector euclídeo, aunque se pueden utilizar coordenadas curvilíneas que tienen propiedades tensoriales, pero no representan un vector físico genuino.
Posición en la Mecánica Cuántica
En mecánica cuántica, la noción de posición de una partícula es mucho más compleja. El principio de incertidumbre de Heisenberg establece un límite fundamental a la precisión con la que se puede conocer simultáneamente la posición y el momento de una partícula. En lugar de una posición definida, se trabaja con una función de onda que describe la probabilidad de encontrar la partícula en una determinada región del espacio. Las coordenadas en la función de onda no representan necesariamente la posición de una partícula en un sentido clásico.
Determinación de la Posición
Para determinar la posición de un cuerpo, es necesario establecer un sistema de referencia adecuado. En una dimensión, la posición se determina mediante una única coordenada que indica la distancia al origen. En dos dimensiones, se utilizan dos coordenadas (generalmente cartesianas o polares). En tres dimensiones, se utilizan tres coordenadas.
Una Dimensión
En un movimiento unidimensional, la posición se representa en una recta numérica, donde el origen (0) es un punto de referencia. Los valores positivos indican posiciones a un lado del origen, y los negativos al otro lado. Por ejemplo, P(8) indica una posición a 8 unidades a la derecha del origen, mientras que P(-6) indica una posición a 6 unidades a la izquierda.
Dos Dimensiones
En dos dimensiones, se utiliza un sistema de coordenadas cartesianas (x, y) o polares (r, θ). Las coordenadas cartesianas indican las distancias a los ejes x e y, con signos positivos o negativos según el cuadrante. Las coordenadas polares indican la distancia al origen (r) y el ángulo (θ) que forma el vector de posición con el eje x.
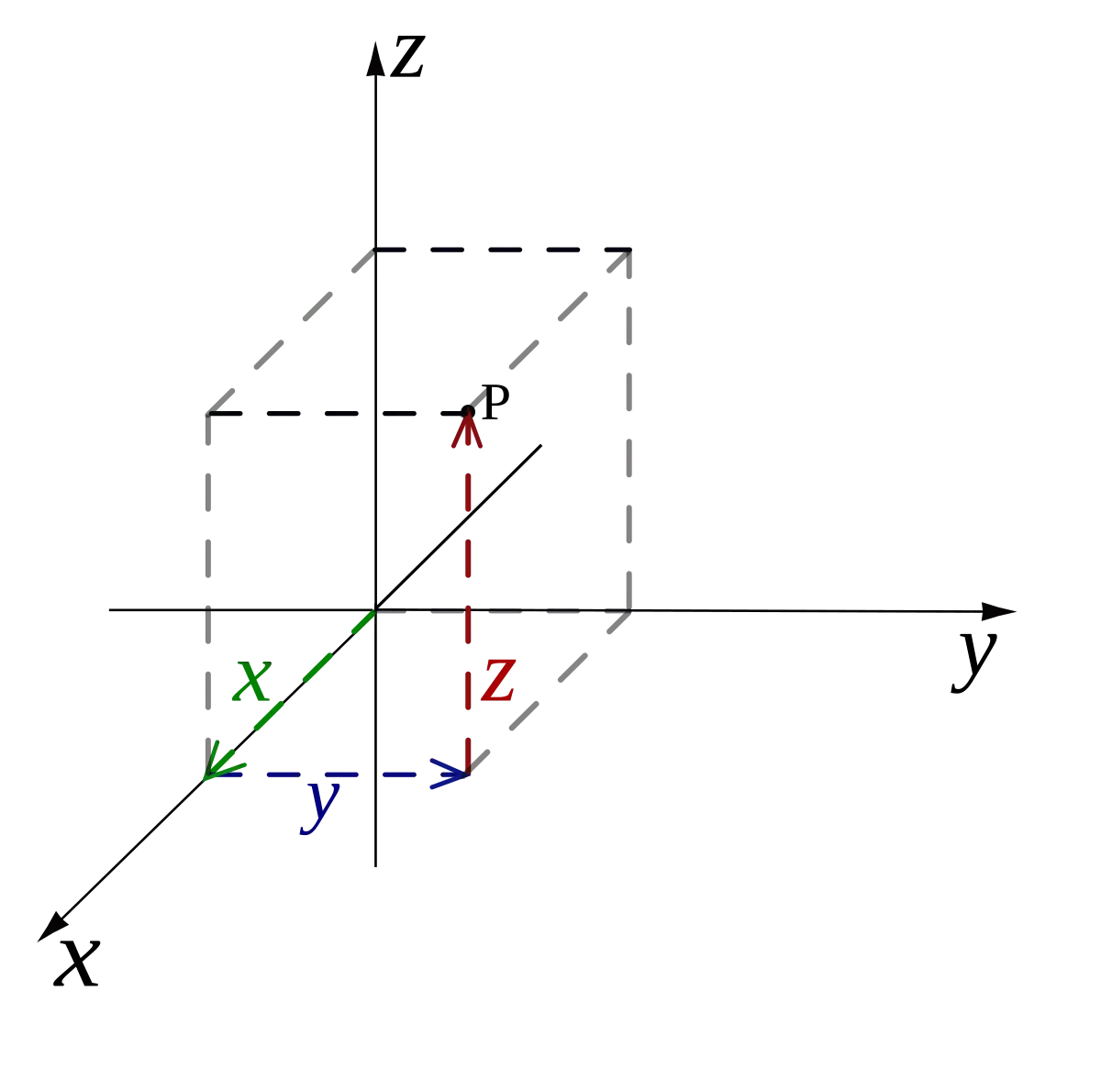
Tres Dimensiones
En tres dimensiones, se utiliza un sistema de coordenadas tridimensional, ya sea cartesiano (x, y, z) o un sistema de coordenadas esféricas o cilíndricas dependiendo del problema.
El Tiempo como Cuarta Dimensión
El movimiento implica un cambio de posición con el tiempo. Al representar el conjunto de posiciones que ocupa un móvil a lo largo del tiempo, se obtiene la trayectoria del objeto. Una gráfica de posición en función del tiempo permite visualizar el movimiento del objeto y analizar sus características, como la velocidad y la aceleración.
La representación de la posición es un concepto fundamental en la física que se adapta a las diferentes teorías y contextos. La elección del sistema de referencia, el tipo de coordenadas y la consideración de factores como la rotación o la curvatura del espacio son cruciales para una descripción precisa y completa del movimiento o del estado de un sistema físico.