16/01/2010
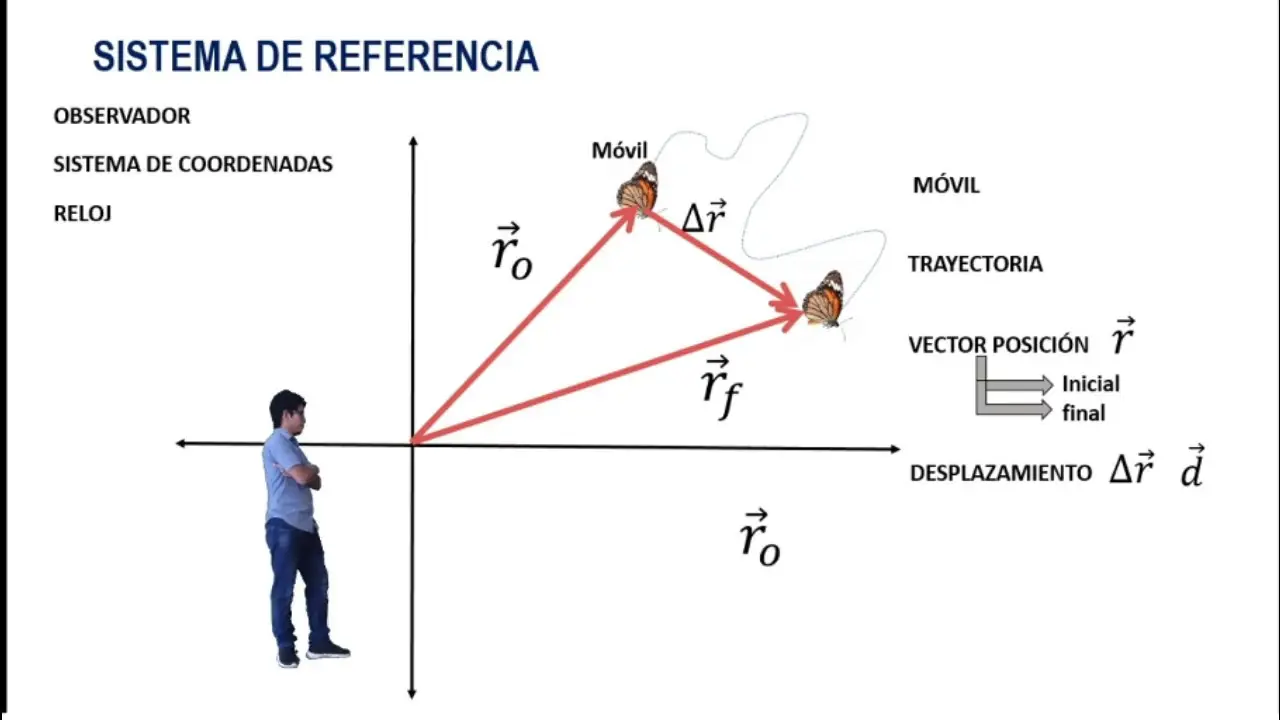
La representación gráfica de datos en un sistema de referencia es fundamental en física para visualizar y analizar el movimiento de objetos. Un sistema de referencia se define por un origen y tres ejes perpendiculares (generalmente X, Y, Z) que permiten establecer la posición de un punto en el espacio. La elección del sistema de referencia es crucial, ya que las mediciones de posición, velocidad y aceleración dependerán del sistema elegido.

Tipos de Sistemas de Referencia
Existen dos tipos principales de sistemas de referencia:
- Sistema de referencia inercial: Un sistema que está en reposo o se mueve con velocidad constante. En un sistema inercial, la primera ley de Newton (ley de inercia) se cumple: un objeto en reposo permanece en reposo, y un objeto en movimiento permanece en movimiento con velocidad constante a menos que actúe una fuerza externa sobre él.
- Sistema de referencia no inercial: Un sistema que se encuentra en aceleración. En un sistema no inercial, se observan fuerzas ficticias o inerciales, que no son fuerzas reales, sino consecuencias de la aceleración del sistema de referencia.
Representación Gráfica en Sistemas Inerciales
En un sistema de referencia inercial, la representación gráfica del movimiento es más sencilla. Consideremos el movimiento de una partícula. Podemos representar su posición en función del tiempo (x vs t, y vs t, z vs t), su velocidad en función del tiempo (Vx vs t, Vy vs t, Vz vs t), y su aceleración en función del tiempo (Ax vs t, Ay vs t, Az vs t).
Ejemplo: Si una partícula se mueve con velocidad constante en una dirección, su gráfica de posición vs tiempo será una línea recta con pendiente igual a la velocidad. Su gráfica de velocidad vs tiempo será una línea horizontal, y su gráfica de aceleración vs tiempo será una línea en cero.
Representación Gráfica en Sistemas No Inerciales
En un sistema de referencia no inercial, la representación gráfica es más compleja debido a la presencia de fuerzas inerciales. Para representar el movimiento correctamente, es necesario considerar estas fuerzas ficticias. Un ejemplo común es el movimiento de un objeto en un vehículo que acelera o frena bruscamente.
Ejemplo: Si una persona está parada en un autobús que frena repentinamente, experimentará una fuerza inercial que la impulsa hacia adelante. Para un observador fuera del autobús (en un sistema inercial), la persona simplemente continúa moviéndose con la misma velocidad que el autobús hasta que algo la detiene. Sin embargo, para un observador dentro del autobús (en un sistema no inercial), la persona parece ser empujada hacia adelante por una fuerza ficticia.
Transformaciones de Galileo
Las transformaciones de Galileo son un conjunto de ecuaciones que permiten relacionar las coordenadas de un evento en dos sistemas de referencia inerciales que se mueven con velocidad constante uno respecto al otro. Estas transformaciones son válidas para velocidades mucho menores que la velocidad de la luz.
Ecuaciones de Galileo:
| Magnitud | Sistema de Referencia O | Sistema de Referencia O' |
|---|---|---|
| Posición (r) | r | r' = r - Vt |
| Velocidad (v) | v | v' = v - V |
| Aceleración (a) | a | a' = a |
Donde:
- r y r' son los vectores de posición en los sistemas O y O', respectivamente.
- v y v' son los vectores de velocidad en los sistemas O y O', respectivamente.
- a y a' son los vectores de aceleración en los sistemas O y O', respectivamente.
- V es la velocidad relativa entre los dos sistemas de referencia.
- t es el tiempo.
Estas ecuaciones muestran que la aceleración es la misma en ambos sistemas de referencia inerciales, mientras que la posición y la velocidad son relativas a la velocidad del sistema de referencia.
Representaciones Gráficas Avanzadas
Existen diferentes técnicas para representar gráficamente el movimiento en sistemas de referencia, dependiendo de la complejidad del movimiento y la información que se desea visualizar. Algunas técnicas comunes incluyen:

- Diagramas de cuerpo libre: Se usan para representar las fuerzas que actúan sobre un objeto.
- Diagramas de vectores: Se utilizan para representar gráficamente vectores de posición, velocidad y aceleración.
- Gráficas de trayectoria: Muestran la trayectoria de un objeto en el espacio.
- Animaciones: Permiten visualizar el movimiento de objetos en el tiempo.
Consideraciones Adicionales
Al realizar una representación gráfica en un sistema de referencia, es importante considerar:
- Escalas apropiadas: Las escalas deben ser elegidas cuidadosamente para asegurar que la gráfica sea clara y fácil de interpretar.
- Etiquetado claro: Los ejes, las variables y las unidades deben estar claramente etiquetados.
- Leyendas: Las leyendas deben ser incluidas para explicar cualquier símbolo o abreviatura utilizada.
- Precisión: La precisión de la representación gráfica debe ser consistente con la precisión de los datos.
La representación gráfica en un sistema de referencia es una herramienta esencial para analizar y comprender el movimiento de objetos. La elección del sistema de referencia y el uso de las técnicas apropiadas son cruciales para obtener una representación precisa y útil de los datos.
Consultas Habituales
¿Cómo represento el movimiento circular uniforme en un sistema de referencia? Para el movimiento circular uniforme, se puede utilizar un sistema de coordenadas polares (r, θ) donde 'r' es la distancia al centro del círculo y 'θ' es el ángulo. La velocidad angular (ω) es constante, y la velocidad lineal (v) es tangencial al círculo. La aceleración centrípeta (ac) siempre está dirigida hacia el centro del círculo.
¿Cómo represento el movimiento parabólico en un sistema de referencia? El movimiento parabólico se puede representar utilizando un sistema de coordenadas cartesianas (x, y). La trayectoria es una parábola, y las componentes de la velocidad y la aceleración se pueden analizar por separado. La aceleración en la dirección 'y' es constante (debido a la gravedad), mientras que la aceleración en la dirección 'x' es cero.
¿Cómo se manejan las rotaciones en los sistemas de referencia? Las rotaciones en los sistemas de referencia se manejan mediante matrices de rotación. Estas matrices transforman las coordenadas de un punto en un sistema de referencia a otro sistema de referencia rotado. Este concepto es crucial en cinemática y dinámica.