20/08/2021
El control Proporcional Integral Derivativo (PID) es una técnica ampliamente utilizada para regular sistemas hacia un valor deseado. Su aplicación es vastísima, abarcando desde el control de temperatura hasta procesos complejos en química e ingeniería. En este artículo, exploraremos a fondo el concepto de PID gráfica, su ajuste y optimización.

¿Qué es un PID y para qué sirve?
Un controlador PID es un algoritmo que ajusta la salida de un sistema basándose en el error entre el valor deseado (setpoint) y el valor medido. Este error se procesa a través de tres términos:
- Proporcional (P) : Responde al error actual. Un error mayor genera una corrección mayor.
- Integral (I) : Considera el error acumulado en el tiempo. Elimina el error de estado estacionario.
- Derivativo (D) : Predice el error futuro basándose en la tasa de cambio del error. Reduce las oscilaciones.
La combinación de estos tres términos permite un control preciso y estable del sistema. La representación gráfica de estos términos y su interacción es fundamental para entender el comportamiento del sistema.
¿Qué es una PID gráfica ?
Una PID gráfica es una representación visual del comportamiento del controlador PID. Puede mostrar la evolución del error, la salida del controlador, y la respuesta del sistema a lo largo del tiempo. Esta representación facilita la comprensión de cómo los parámetros del PID (Kp, Ki, Kd) afectan al rendimiento del sistema. Permite identificar problemas como oscilaciones excesivas, respuesta lenta o error de estado estacionario.
Cómo se ajusta un PID
Ajustar un PID es crucial para obtener el rendimiento deseado. Existen varios métodos, desde el método de Ziegler-Nichols hasta técnicas más avanzadas. Un enfoque común, aunque iterativo, consiste en:
- Establecer Kp, Ki y Kd a cero.
- Aumentar gradualmente Kp hasta que el sistema empiece a oscilar. Este es el valor máximo de Kp (Kp_max).
- Ajustar Kd para reducir las oscilaciones.
- Ajustar Ki para eliminar el error de estado estacionario.
Este método, aunque sencillo, puede resultar tedioso. Existen métodos más precisos, como el descrito a continuación:
Ajuste del PID mediante caracterización del sistema
Para un ajuste más preciso y eficiente, es necesario caracterizar el sistema. Si se trata de un motor, se necesita un sistema de lectura (encoder) para determinar su velocidad y aceleración. Los pasos son:
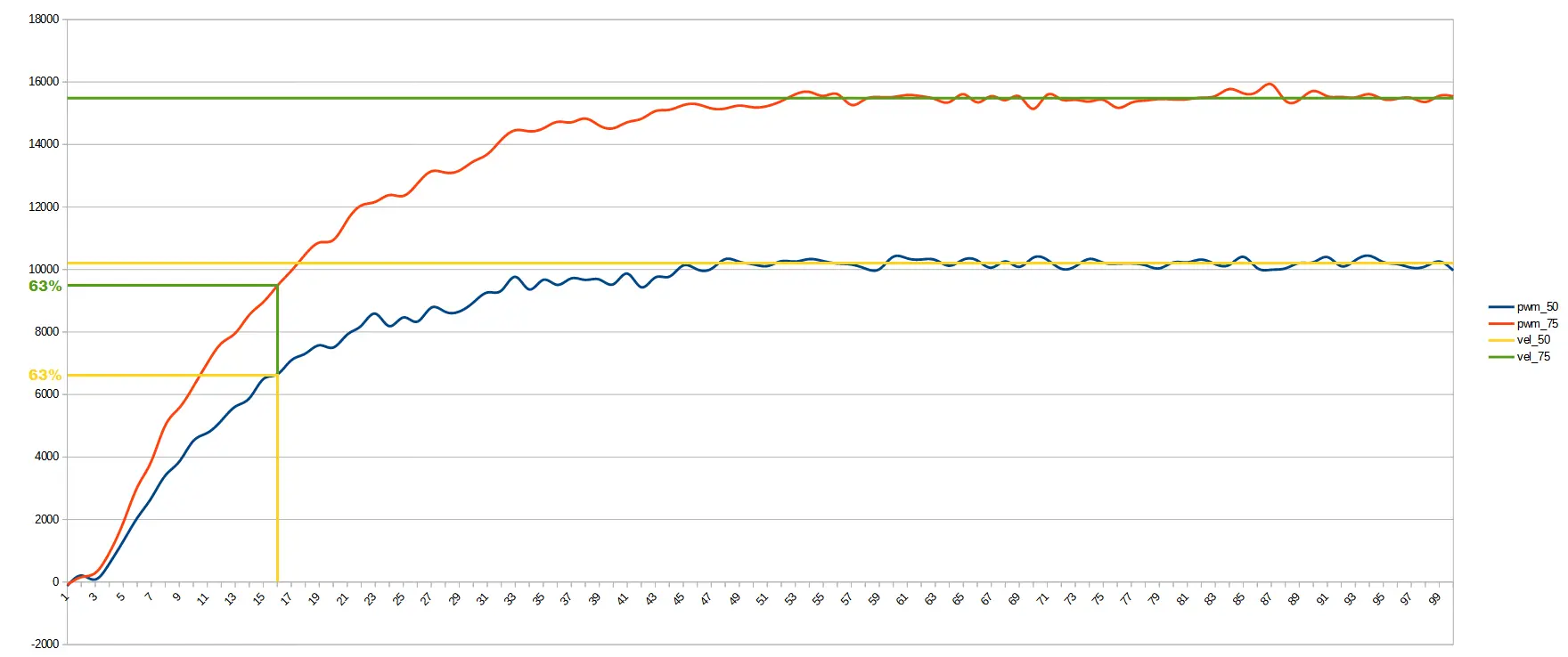
- Caracterizar el sistema: Medir la respuesta del sistema a diferentes entradas. Determinar la ganancia del sistema (Km) y la constante de tiempo (Tm). Por ejemplo, medir la velocidad del motor a diferentes valores de PWM.
- Calcular Kp y Kd: Utilizar las formulas siguientes (donde ζ es la variable de amortiguamiento, que suele ser 0.707):
- Kp = Tm / Km 16 / (ζ^2 Td^2)
- Kd = (8Tm - Td) / (Td Km)
- Ajustar Td (Tiempo de estabilización): Un buen punto de partida es Tm o la mitad de Tm. Experimentar con diferentes valores de Td para optimizar la respuesta.
Este método matemático proporciona valores iniciales más precisos para Kp y Kd, acelerando el proceso de ajuste y mejorando el rendimiento del sistema. La inclusión de Ki dependerá del sistema y de la necesidad de eliminar completamente el error de estado estacionario.
Tabla Comparativa de Métodos de Ajuste PID
| Método | Ventajas | Desventajas |
|---|---|---|
| Método Ziegler-Nichols | Simple y rápido | Menos preciso, posible inestabilidad |
| Método de caracterización del sistema | Más preciso, mayor estabilidad | Requiere mayor conocimiento del sistema |
| Ajuste manual iterativo | Intuitivo | Lento y tedioso |
Consideraciones Adicionales
El ajuste del PID puede variar dependiendo del sistema en cuestión. Factores como no linealidades, perturbaciones externas, y tiempo muerto deben tenerse en cuenta. La PID gráfica ayuda a visualizar estos efectos y a ajustar el controlador en consecuencia. En algunos casos, un control PD (sin la componente integral) puede ser suficiente para obtener un buen rendimiento. La inclusión de la componente integral (I) debe ser cuidadosamente considerada, pues puede introducir oscilaciones o inestabilidad.
La optimización de un sistema de control PID requiere comprender su funcionamiento y aplicar métodos de ajuste adecuados. La utilización de una PID gráfica, así como el método matemático de caracterización del sistema, permite un ajuste más preciso y eficiente, lo que resulta en un control superior y un mejor rendimiento general. Experimentar con diferentes valores de los parámetros del PID y observar su efecto en la respuesta del sistema a través de una PID gráfica es clave para la optimización.